|
棘轮机构这个名字,有不少机械爱好者都表示很陌生,然而耳生不代表没接触过哟~~虽然大家很少留意到它们,但在生活中棘轮装置几乎是无处不在的。 棘轮机构是由看着很像齿轮的棘轮(ratchet)和棘爪(pawl)组成的一种单向间歇运动机构,它的作用是将连续转动或往复运动转换成单向步进运动。  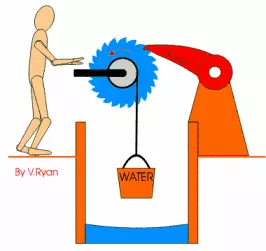 机械专业的描述是:主动件空套在与棘轮固连的从动轴上,并与驱动棘爪用转动副相联。当主动件顺时针方向摆动时,驱动棘爪便插入棘轮的齿槽中,使棘轮跟着转过一定角度,此时,止回棘爪在棘轮的齿背上滑动。当主动件逆时针方向转动时,止回棘爪阻止棘轮发生逆时针方向转动,而驱动棘爪却能够在棘轮齿背上滑过,所以,这时棘轮静止不动。因此,当主动件作连续的往复摆动时,棘轮作单向的间歇运动。 常用的外啮合式棘轮机构,由主动摆杆,棘爪,棘轮、止回棘爪和机架组成(前面介绍的手动绞盘基本上就是一个棘轮机构的实物模型)。常用于各种机床和自动机的中间歇进给或回转工作台的转位上,也常用在千斤顶上,在自行车中棘轮机构用于单向驱动,在手动绞车中棘轮机构常用以防止逆转。其实它的应用非常广泛。 ↓↓间歇运动↓↓  ↓↓单向运动:朝一个方向可以正常转动,反向则会一卡一卡↓↓  ↓↓单爪棘轮:摇臂逆时针旋转时,起动爪即跟其摆动而推动棘轮,沿逆时针转一角度,摇臂回摆时,棘轮则静止不动。缺点为摇臂回摆时无作用,浪费时间。摇臂回摆时,可能会带动棘轮向后运行,故需另家一止动爪子。  ↓↓多爪棘轮:将原单爪棘轮的一个行程两个或三个行程。可使传动之效果更为细密。  ↓↓双动棘轮(Double Acting Ratchet Wheel):双动棘轮系由二驱动爪交替间歇推动棘轮,不管摇杆左右摆动,都可以使棘轮往一定方向旋转,没有单爪棘轮之无效时间,故可产生近似连续之旋转输出运动。较单爪棘轮、双爪棘轮节省时间。  ↓↓可逆棘轮(Reversible Pawl,又称回动棘轮):棘轮可视需要作正、反两方向之旋转。用于一般刨床之自动进给机构及套筒板手。  ↓↓起重棘轮:又称棘齿条,当棘轮之直径无穷大时,棘轮就成为棘齿条。棘齿条做间歇直线运动。前面提到的猴爬杆、水管扳手就是类似这样的东西,你一定还能想到更多。  ↓↓无声棘轮(Silent Ratchet):棘轮机构工作时会发发出卡哒卡哒的噪音和振动。因为这种咔哒咔哒的特质声,有了一种敲击乐器,名字就叫棘轮。 但是老咔哒咔哒响也怪烦人的,工作频率也不能过高。所以人们又发明了一种不使用驱动爪,而是利用摩擦力来驱动,故又称为摩擦式棘轮,传动时安静无声。常用于套筒板手及钻床。 ↓↓内摩擦棘轮机构↓↓ 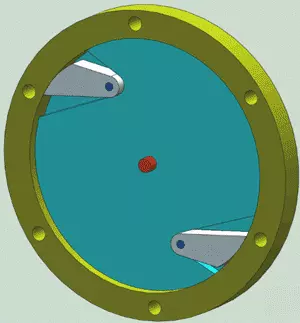 ↓↓滚子内接棘轮机构↓↓  ↓↓一小波棘轮装置应用示意↓↓ ↓↓盘状棘轮↓↓ 说了这么多,我们通过47副动画来详细了解下棘轮机构! 1.棘轮机构1(Ratchet mechanism 1) 将驱动轴的连续旋转直接转换成驱动轴的间断性旋转的设备。 2.棘轮机构2(Ratchet mechanism 2) 此机制直接将驱动轴的连续旋转转换成驱动轴的间断性旋转。 通过下移蓝色棘爪无需改变输入的运动方向即可改变被驱动轴的运动方向。 3.钣金棘轮传动1(Sheet metal ratchet drive 1) 1)适用于轻负载 2)低成本 3)适用于大规模生产 4)棘爪与棘轮的永久性接触由棘爪的重量维持 4.钣金棘轮传动2(Sheet metal ratchet drive 2) 1)适用于轻负载 2)低成本 3)适用于大规模生产 4)棘爪与棘轮的永久性接触由棘爪的重量维持 5.棘轮机构3(Ratchet mechanism 3) 通过调整粉色后盖的位置可以得到绿色轮的不同旋转角度。 拉动橙色棘爪并使其旋转180°可以改变绿色轮的旋转方向。 此机制用于成形器。 6.棘轮机构4(Ratchet mechanism 4) 棘轮有内齿。 7.棘轮机构5(Ratchet mechanism 5) 自行车自由轮。 蓝色链轮从脚踏自行车接收运动。 黄色轮毂仅在蓝色链轮顺时针旋转时旋转。 黄色轮毂顺时针旋转对蓝色链轮没有影响。 由于弹簧的作用,红色棘爪总是压向链轮的内齿。 现实中使用了两个棘爪。 8.棘轮机构8(Ratchet mechanism 8) 绿色输入圆盘通过蓝色棘爪使得输出棘轮间断性旋转。 粉色和黄色销控制棘轮的停止时间。 每一个销使得棘轮在输入圆盘旋转1/8周期间停止。 由于弹簧(未显示)的作用,蓝色棘爪总是压向棘轮齿。 9.棘轮机构9(Ratchet mechanism 9) 有两个棘爪。 粉色棘爪推动棘轮。 绿色棘爪在粉色棘爪反向运动时维持棘轮静止。 10.棘轮机构12(Ratchet mechanism 12) 有两个棘爪。 绿色棘爪推动粉色齿轮,且不是一直与其接触(不同于普通棘轮机构)。 蓝色棘爪在绿色棘爪不推动齿轮时维持棘轮静止。 11.销齿轮棘轮机构1(Ratchet mechanism of pin gear 1) 输入:粉色曲柄持续性旋转 输出:黄色销齿轮 重力维持蓝色棘爪和销齿轮的接触。 12.棘轮机构13(Ratchet mechanism 13) 黄色输入圆盘通过橙色棘爪使得绿色输出棘轮间断性旋转。 蓝色凸轮的长度调节棘轮的运动时间。 13.棘轮机构15(Ratchet mechanism 15) 有两个棘爪。 粉色棘爪推动棘轮。 绿色棘爪在粉色棘爪反向时维持棘轮静止。 黄色凹槽凸轮为输入。 14.棘轮机构16(Ratchet mechanism 16) 输入:粉色曲柄的持续性恒速旋转。 15.棘轮机构31(Ratchet mechanism 31) 输入:绿色曲柄震荡 输出:棘轮间断性旋转 蓝色弹簧维持黄色棘爪和棘轮的接触。 特点:内齿棘轮、外棘爪 16.棘轮机构17(Ratchet mechanism 17) 输入:绿色偏心轴 输出:灰色棘轮 重力维持棘爪和棘轮的接触。 17.棘轮机构27(Ratchet mechanism 27) 灰色电磁阀使得蓝色杆往复运动。 异常处:橙色棘爪和蓝色驱动杆通过棱形接头连接,与普通棘爪所用的接头不同。 扁弹簧的作用是维持棘爪和黄色轮的接触。 18.空间棘轮机构1(Spatial Ratchet mechanism 1) 输入:偏心轴持续旋转 输出:端面齿棘轮间断性旋转 重力维持蓝色棘爪和轮的接触。 19.空间棘轮机构2(Spatial Ratchet mechanism 2) 输入:粉色曲柄持续性旋转 输出:齿数为Z的绿色棘轮 往复摆动的黄色曲柄使得棘轮旋转方向相同。 输入旋转一周,输出旋转2/Z周,伴随两次驻留。 20.空间棘轮机构3a(Spatial Ratchet mechanism 3a) 输入:橙色震荡曲柄 输出:齿数为Z的绿色双棘轮 往复摆动的黄色曲柄使得棘轮旋转方向相同。 输入旋转一周,输出旋转1/Z周,伴随两次驻留。 两个棘轮间的角偏移量为360/2Z°。 21.棘轮机构18(Ratchet mechanism 18) 输入:蓝色曲柄 输出:粉色棘轮 往复摆动的曲柄使得棘轮旋转方向相同。 棘爪推动棘轮。 重力维持棘爪和棘轮的接触。 22.棘轮机构19(Ratchet mechanism 19) 输入:绿色曲柄 输出:棘轮 往复摆动的曲柄使得棘轮旋转方向相同。 棘爪推动棘轮。 重力维持棘爪和棘轮的接触。 23.棘轮机构20(Ratchet mechanism 20) 输入:绿色曲柄 输出:蓝色棘轮 往复摆动的曲柄使得棘轮旋转方向相同。 黄色和橙色棘爪推动棘轮。 紫色弹簧维持棘爪和棘轮的接触。 24.棘轮机构21(Ratchet mechanism 21) 输入:粉色曲柄 输出:可以双向间断性旋转的黄色棘轮 红色弹簧维持棘爪和棘轮的接触。 灰色部分的作用是预防两轮之间的接触以及其中一个棘爪改变输出的旋转方向。 25.棘轮机构22(Ratchet mechanism 22) 输入:粉色曲柄 输出:绿色棘轮 往复摆动的蓝色滑块使得棘轮旋转方向相同。 橙色棘爪和黄色棘爪推动棘轮。 红色弹簧维持棘爪和棘轮的接触。 26.棘轮机构23(Ratchet mechanism 23) 输入:绿色曲柄 输出:蓝色棘轮 往复摆动的绿色曲柄使得棘轮旋转方向相同。 橙色棘爪和黄色棘爪推动棘轮。 重力维持棘爪和棘轮的接触。 27.棘轮机构23(Ratchet mechanism 23) 输入:绿色曲柄 输出:棘轮 往复摆动的绿色曲柄使得棘轮旋转方向相同。 棘爪推动棘轮。 弹簧维持棘爪和棘轮的接触。 28.销齿轮棘轮机构2(Ratchet mechanism of pin gear 2) 输入:绿色曲柄 输出:黄色销齿轮 往复摆动的绿色曲柄使得齿轮旋转方向相同。 橙色棘爪和黄色棘爪推动齿轮。 灰色杆推动齿轮。 重力维持棘爪和棘轮的接触。 29.棘轮机构24(Ratchet mechanism 24) 输入:绿色曲柄 输出:黄色棘轮 蓝色棘轮自由配合在紫色固定轴上。 蓝色棘轮和紫色轴间的摩擦由红色弹簧产生,从而阻止蓝色轮反向。 往复摆动的蓝色滑块使得棘轮旋转方向相同。 粉色棘爪使得蓝色棘轮旋转。 橙色棘爪使得黄色棘轮旋转。 重力维持棘爪和棘轮的接触。 30.棘轮机构26(Ratchet mechanism 26) 输入:蓝色凸轮 输出:旋转间断性伴有长时间驻留的粉色棘轮 往复摆动的黄色棘爪使得棘轮旋转方向相同。 棘爪在棘轮驻留时维持其静止。 红色弹簧维持棘爪和凸轮的接触。 31.棘轮机构32(Ratchet mechanism 32) 输入:绿色曲柄 输出:间断性旋转的齿数为Z的棘轮 重力维持2个共轴棘爪和棘轮的接触。 棘轮的厚度必须为棘爪的两倍。 32.棘轮机构33(Ratchet mechanism 33) 输入:绿色曲柄 输出:间断性旋转的齿数为Z的棘轮 重力维持3个相同棘爪和棘轮的接触。 33.反反向棘轮机构2(Ratchet mechanism for anti-reverse 2) 黄色棘轮只逆时针旋转。 蓝色滑块阻止机制反向。 34.反反向棘轮机构3(Ratchet mechanism for anti-reverse 3) 黄色端面齿棘轮只顺时针旋转。 粉色棘爪阻止机制反向。 35.摩擦棘轮机构1(Friction Ratchet mechanism 1) 黄色凸轮的作用相当于棘爪。 黄色凸轮和绿色无齿轮间的摩擦力驱动绿色轮。 相比普通棘轮机构没有噪声和反弹。 36.摩擦棘轮机构2(Friction Ratchet mechanism 2) 输入:橙色摆动鼓 输出:间断性旋转的黄色轴 四个扁弹簧只允许逆时针方向传递运动。 此机制用于轻型工程以及对输入和输出间的运动关系要求不严格的地方。 37.摩擦棘轮机构3(Friction Ratchet mechanism 3) 输入:蓝色摆动杆 输出:间断性旋转的换色轴 弹簧的一端固定在蓝色杆上。 弹簧盒黄色轴间需要轻微的抓力。 扭转弹簧只允许顺时针方向传递运动。 弹簧螺旋方向决定传递方向。 由于弹簧和轴之间的摩擦力,倾向于收紧弹簧的旋转方向传递到黄色输出轴。 对于反向,如果没有反弹力或者负载,黄色输出轴可以旋转。 此机制用于轻型工程以及对输入和输出间的运动关系要求不严格的地方。 38.摩擦棘轮机构4(Friction Ratchet mechanism 4) 输入:蓝色摆动杆 输出:间断性旋转的黄色内锥盘 当杆改变其方向时,红色弹簧销的轻微摩擦力阻止绿色外锥盘随着杆旋转。 因此,绿色盘像一个螺母沿着杆的螺纹往复移动。 此运动使得两盘接触或者脱离接触。 39.摩擦棘轮机构5(Friction Ratchet mechanism 5) 输入:蓝色摆动杆 输出:间断性旋转的棕色V型槽轮 黄色扁弹簧维持粉色棘爪和轮的接触。 40.摩擦棘轮机构6(Friction Ratchet mechanism 6) 输入:绿色摆动杆 输出:间断性旋转的橙色轮 红色扁弹簧维持黄色楔形物的接触。 41.摩擦棘轮机构7(Friction Ratchet mechanism 7) 输入:粉色曲柄 输出:间断性旋转的黄色轮 紫色销在无传递期间维持灰色蹄铁的位置。 42.摩擦棘轮机构8(Friction Ratchet mechanism 8) 输入:蓝色摆动杆 输出:间断性旋转的黄色轮 粉色销可以在杆洞中滑动。 蓝色轴的环形槽与销的扁平底部接触。 43.静棘轮机构1(Quiet Ratchet mechanism 1) 输入:持续旋转的粉色曲柄 输出:间断性旋转的黄色棘轮 4连杆(粉色曲柄,蓝色连杆,橙色棘爪块和绿色摇杆)使得绿色摇杆摆动。 紫色阻塞物与绿色摇杆配合。 为绿色摇杆创造破坏力的方法未显示。 由于摇杆往回摆动,棘爪不会和棘轮接触,所以此机制安静。 44.静棘轮机构2(Quiet Ratchet mechanism 2) 输入:持续旋转的粉色曲柄 输出:间断性旋转的黄色棘轮 滑槽机构(粉色曲柄,蓝色滑块和绿色凹槽摇杆)使得绿色摇杆摆动。 粉色曲柄为紫色曲柄创造破坏力。 绿色摇杆上的两个销与棘爪接触。 由于摇杆往回摆动,棘爪不会和棘轮接触,所以此机制安静。 45.静棘轮机构2(Quiet Ratchet mechanism 3) 输入:持续旋转的粉色曲柄 输出:间断性旋转的黄色棘轮 六连杆(粉色曲柄,蓝色连杆,黄色和紫色杆,橙色棘爪和绿色摇杆)使得绿色摇杆摆动。 两个红色阻塞物与绿色摇杆配合。 |
|
|














