一、极点(extreme point)继续考虑钉子与橡皮筋的例子。我们可以发现边缘上的钉子是对范围圈定“有贡献”的,而范内部的的钉子对范围圈定是“没有贡献的”。这只是直观的结论,严谨考虑我们将其抽象为极性与极点的概念。
简单的数学前提:过一个点有无数直线;有向直线可以将平面划分确定的左右两部分;
可以在图像上表示为:
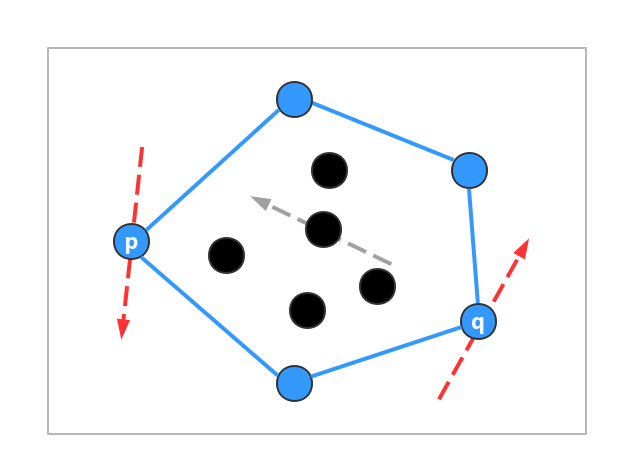 可以发现,边缘上“有贡献”的钉子,总可以找到一条穿过它的有向直线,使得其余是有点都处于直线的同一边;而范围内“没有贡献”的钉子则无法找到这种有向直线。这正是两种点的本质区别:极性。我们将这些“有贡献”的点就称为:极点(extreme point)。那么如何将极点在点集中筛选出来呢?也就是给定一个多边形,如何判断它是凸的呢?
二、凸包构造方法考虑冒泡排序的原理:序列是有序的当且仅当它的每个子序列都是有序的。类比冒泡排序的原理来考察凸包问题,如果一个多边形是对应点集的凸包,当且仅当多边形各点都是极点,或者说多边形各点都是有“有贡献”的。即:凸包由极点集确定。
那么如何确定某个点是否为极点呢?再考虑颜色勾兑的例子,某种颜色能被其他颜色勾兑出来,当且仅当该颜色对应的点包含于另外三个点的范围内。因此可以将其余点的所有三角形组合与待定点做判断,若待定点不在任何一个三角形的范围内,则说明待定点是一个极点。所有极点就能构成凸包,这就是凸包的基本构造步骤。
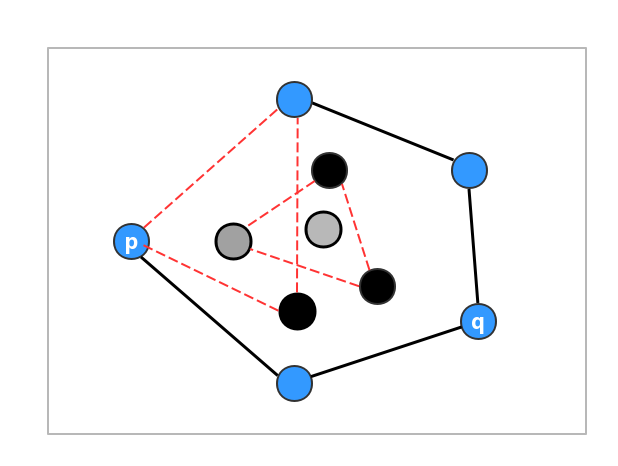 上图中处于某三角形内部的两点都判定为非极点。
通过上述论证,我们的计算任务划分为子任务:
判断某待定点是否位于某个三角形的内部(in-triangle test)
通过反复进行in-triangle test,我们就能将各个非极点排除,最终得到极点集合,构成凸包。而进行in-triangle test的基础就是to-left test。
三、to-left test上述筛选极点的算法伪代码描述为:
Mark all points of S as EXTREME //首先将集合S的所有点标记为极点
for each triangle △(p, q, r) //对于每个三角形pqr(枚举每个三角形)
for each s ∈ S\{p, q, r} //若某个集合S内非pqr的点s
if s ∈ △(p, q, r) then //若s在三角形pqr内(in-triangle test)
mark s as NON_EXTREME //则将s标记为非极点
这个算法看似非常直白,但是其中第二行:枚举每个三角形,需要三重循环,加上第3句枚举每个点s,整个算法至少要O(n^4)的复杂度。
为了解决基础算法复杂度过高的问题,我们引入to-left test算法。
首先还是来看in-triangle test:如何判断待定是否落在某三角形内部。将in-triangle test划分为子任务:三次to-left test,每条边对应一次to-left test,且三次测试返回相同结果(true/false)。
我们知道,每两个点能确定一条直线,而对于每个有向直线能将平面分为左右两部分。
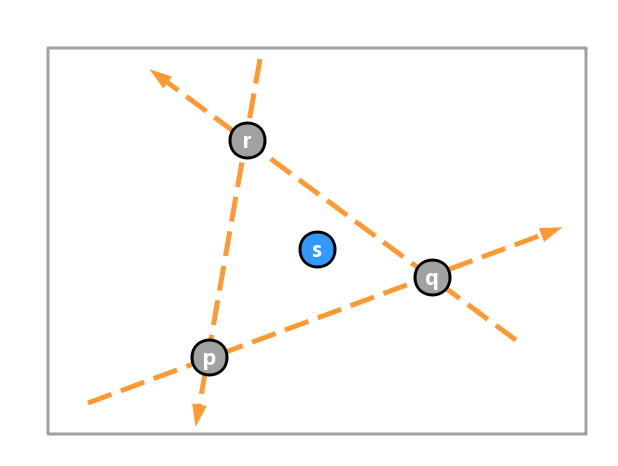 按照惯例约定逆时针来表示三角形,因此三角形pqr对应三个有向直线:pq,qr,rp。而待定点s若在三角形pqr内部,当且仅当s对于三个有向直线都在左侧。即:
ToLeft(p, q, s) == true;
ToLeft(q, r, s) == true;
ToLeft(r, p, s) == true;
实际上三条直线能将平面最多切分为7块,每一块都对应三个to-left测试,而只有三角形内部的区域中三个to-left测试结果全为真。
考虑如下一般情况:
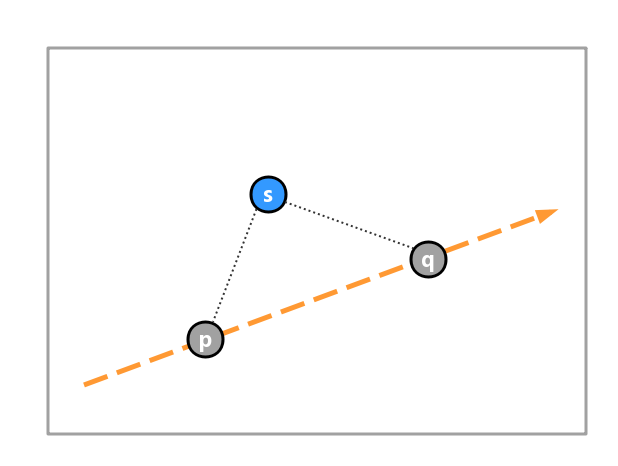 当然可以通过解析几何的方式实现:每个直线对应一个解析方程,点到直线的距离能够通过公式计算。但是这种方式并不是最好的,其缺陷很明显。我们先看更通用的方法:计算三角形pqs的面积S。S可由以下行列式计算(算出的是两倍面积):
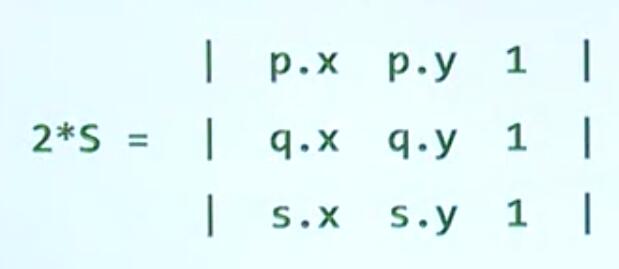 注意此处计算出的面积是由正负的,面积为正,则s位于有向直线pq的左侧,面积为负,则s位于有向直线pq的右侧。因此得到了to-left test的算法:
四、极边(extreme edge)通过极点的引入并没有降低凸包构造算法O(n^4)的复杂度,为此我们转换视角,从边的角度考虑问题。
类比极点,引入极边(extreme edge)的概念,如下图中:
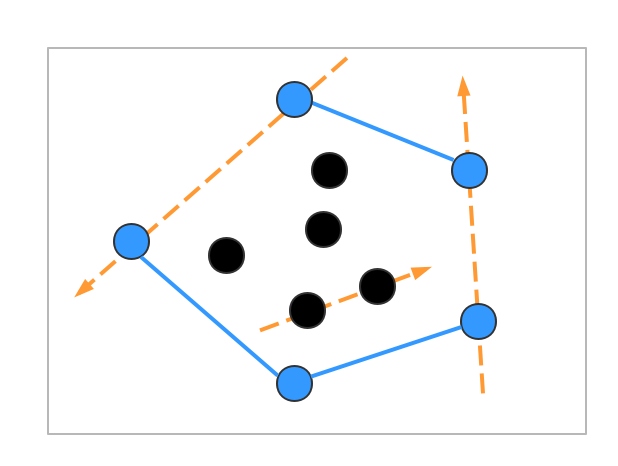 所谓极边就是点集S中过某两点的有向直线,使得S中其余点都落在此直线的一侧,而非极边则两侧总是都有点。与极点类似,所有极边圈出的区域构成了凸包。依然选择逆时针顺序来看,对于任何一个极边,其余点的to-left测试都是true。
因此,构造凸包的问题转化为如何筛选极边的问题。算法伪码描述如下:
for each directed segment pq //对于每个有向边pq
if points in S\{p, q} lie to the same side of pq then //如果S中除了pq外是有点都在有向边pq同侧
let EE = EE ∪ {pq} //则边pq是极边
再来分析一下复杂度。首先枚举每条边需要n^2复杂度,接下来判断某个边是不是极边仅需要线性复杂度,因此算法复杂度为O(n^3),比极点方法提高了一个量级。
然后将上述伪码用C++表述出来:
本文是学堂在线课程《计算几何》的笔记,参考资料:《计算几何——算法与应用》Mark de Berg等著,邓俊辉译;《计算几何——算法设计与分析》 周培德著 |
|
|
















